MATLAB保存图数据丢失问题解析与Webots、MATLAB/Simulink联合仿真实践分享
在人工智能基础软件开发过程中,数据完整性与仿真流程的可靠性是项目成功的关键。本文将从一次常见的MATLAB图数据丢失问题入手,分享解决经验,并系统介绍Webots与MATLAB/Simulink的联合仿真方法,为相关领域的开发者提供参考。
一、 MATLAB保存图数据丢失问题分析与解决
问题现象:在利用MATLAB进行数据处理或仿真后,保存的图表(如.fig文件或导出的图像)有时会出现数据系列丢失、坐标轴标签不完整或图例错误等情况,尤其是在脚本批量生成图表或使用saveas、exportgraphics函数时。
根本原因:
1. 句柄管理不当:在循环或函数中创建图形时,未正确管理图形句柄,导致保存时引用错误对象。
2. 异步操作干扰:若在图形渲染完成前执行保存命令(尤其是在自动化脚本中),可能捕获到不完整的图像。
3. 文件路径与权限问题:指定了不存在或没有写入权限的路径,导致保存失败但未抛出明确错误。
4. MATLAB版本与函数兼容性:不同版本对图形导出函数的支持存在差异,特别是旧脚本在新环境中的运行。
解决方案与最佳实践:
- 显式管理图形句柄:建议为每个图形创建明确的句柄,例如h = figure;,并在保存时指定该句柄,如saveas(h, 'filename.fig')。
- 确保渲染完成:在保存前添加drawnow命令,强制MATLAB完成所有待处理的图形更新。
- 采用稳健的导出函数:对于高质量图像导出,优先使用exportgraphics(R2020a及以上)或print函数,它们提供更多选项和更好的兼容性。例如:
`matlab
exportgraphics(gcf, 'plot.png', 'Resolution', 300);
`
- 实施错误检查:在保存操作后,验证文件是否成功创建并具有预期大小,可添加简单的文件存在性检查。
- 统一开发环境:尽量保持团队内MATLAB版本的一致,并对关键图形生成代码进行版本适配测试。
二、 Webots与MATLAB/Simulink联合仿真方法详解
Webots是一款开源的机器人仿真软件,而MATLAB/Simulink在算法设计、控制系统建模方面具有强大优势。将二者结合,可以高效完成从算法仿真到机器人行为验证的全流程。
联合仿真的核心价值:
1. 利用各自专长:在Simulink中设计控制算法、感知模型或AI决策模块,在Webots的高保真物理环境中测试机器人实体行为。
2. 加速开发迭代:避免直接部署到实体机器人所需的漫长编译与调试周期,在仿真中快速验证想法。
3. 进行极端条件测试:安全地在仿真中测试危险或成本高昂的场景。
标准工作流程:
1. 环境搭建:
- 确保安装Webots、MATLAB及Simulink,并验证版本兼容性(官网通常提供兼容版本列表)。
- 在Webots中,通过
Tools / MATLAB菜单安装Webots MATLAB API,这将允许MATLAB控制Webots仿真。
- 建立通信:
- 模式一:Webots主导。Webots作为主程序,通过控制器调用MATLAB引擎(
matlab.engine)执行M函数或脚本。适用于以物理仿真为核心,间歇调用MATLAB进行复杂计算的场景。
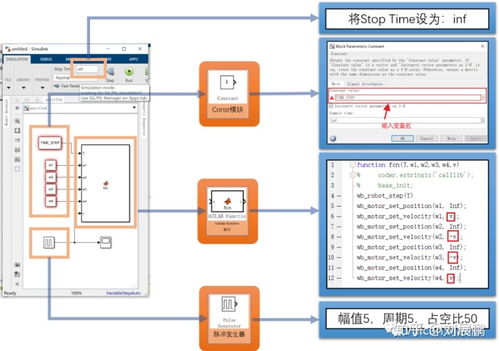
- 模式二:MATLAB/Simulink主导。将Webots机器人模型作为S-Function导入Simulink。这是更紧密的耦合方式,Simulink作为仿真主循环,每一步都调用Webots的物理引擎更新状态。需要在Simulink中配置Webots S-Function块。
- 模型与数据对接:
- 精确定义Webots中传感器(如摄像头、激光雷达)的输出数据格式,并在MATLAB/Simulink中配置相应的输入端口进行解析。
- 同样,将Simulink中控制器的输出(如关节力矩、速度指令)映射到Webots中执行器的输入。
- 仿真与调试:
- 启动联合仿真,利用Simulink Scope或MATLAB图形界面实时监控关键信号。
- 使用Webots的实时3D可视化窗口观察机器人行为,与预期进行对比。
关键技巧与注意事项:
- 性能调优:联合仿真因进程间通信会产生开销。可适当增大Webots的仿真步长(basicTimeStep),或在非必要时关闭Webots的渲染以提升速度。
- 数据同步:确保Webots的仿真步长与Simulink的求解器步长协调,避免因步长 mismatch 导致数值不稳定。
- 错误处理:在MATLAB脚本或Simulink模型中增加健壮的错误捕获机制,记录通信失败或数据异常,便于定位问题。
- 代码生成与部署:经仿真验证后的Simulink控制器模型,可考虑使用Embedded Coder等工具生成C/C++代码,为后续部署到真实机器人控制器做准备。
三、 人工智能基础软件开发的综合思考
将上述经验置于更广阔的人工智能基础软件开发视角下,我们可以提炼出几点核心原则:
- 可重复性至上:无论是数据保存还是仿真实验,都必须保证过程与结果的可重复。这意味着要详细记录软件版本、配置参数和操作步骤,并对关键数据实施版本管理。
- 模块化与接口清晰:如同Webots与Simulink通过定义良好的API进行通信,AI软件的各模块(数据预处理、模型训练、仿真验证)也应设计清晰的接口,便于独立开发、测试与集成。
- 仿真与现实的闭环:联合仿真是连接算法与物理世界的重要桥梁,但需清醒认识其局限性(模型误差、简化假设)。开发流程中应规划从仿真验证到实物小规模测试的递进路径,利用仿真结果指导现实,再用现实数据修正仿真模型。
- 工具链的深入掌握:高效开发离不开对工具链(如MATLAB、Webots、Git等)的深入理解和熟练运用。主动关注官方更新、社区最佳实践,能有效避免类似“图数据丢失”的陷阱,提升开发效率与软件质量。
在人工智能与机器人交叉的领域,细节决定成败。一个稳健的数据保存机制,一个高效的联合仿真流程,都是构建可靠AI软件系统的基石。通过不断积累此类开发经验,并形成系统的方法论,团队能够更从容地应对复杂的技术挑战,推动项目向成功迈进。
如若转载,请注明出处:http://www.ryevvhl.com/product/21.html
更新时间:2026-06-19 17:41:38